آموزشی
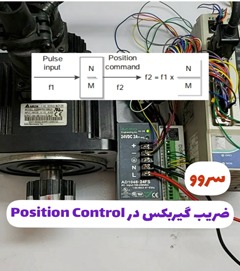
تنظیم ضریب گیربکس سروو موتور در مد Position Control
سروو موتورها عموما قابلیت پشتیبانی از 3 مد کنترلی، کنترل موقعیت Position Control ، کنترل سرعت Speed Control و کنترل گشتاور Torque Control را دارند.برخی

اینورترهای INVT در سالهای اخیر به دلیل عملکرد قابل قبول در کابردهای متفاوت به جایگاه ویژهای در صنعت ایران و دیگر کشورها دست پیدا کردهاند. در این پست نحوه راهاندازی این اینورترها از طریق ترمینالهای خروجی، صفحه کلید و همچنین سیمبندی آنها را بررسی کردهایم.

سیمبندی مدار کنترل

شکل 1. نحوه سیمبندی مدار کنترل اینورتر سری GD20
راهنمای ترمینالها
میزان تحملپذیری اضافهبار
| اضافه بار | مدت زمان |
| 150 درصد جریان نامی | 1 دقیقه |
| 180 درصد جریان نامی | 10 ثانیه |
| 200 درصد جریان نامی | 1 ثانیه |
پارامترهای مهم و کاربردی
| پارامتر | نام | جزئیات |
| P00.01 | فرمان راهاندازی درایو |
این پارامتر نحوه اجرای دستوراتی نظیر راهاندازی، توقف و جهت چرخش را به صورت زیر مشخص میکند. 0: کنترل از طریق صفحه کلید 1: کنترل از طریق ترمینالهای خارجی 2: کنترل از طریق پورت RS485 (مودباس) |
| P00.06 | تعیین مبنای کنترل فرکانس A | 0: تنظیم از طریق صفحه کلید
1: تنظیم از طریق ورودی آنالوگ 1 یا AI1 (پتاسیومتر روی صفحهکلید) 2: تنظیم از طریق ورودی آنالوگ 2 یا AI2 3: تنظیم از طریق ورودی آنالوگ 3 یا AI3 4: تنظیم از طریق ترمینال پالس سرعت بالا (ترمینال HDI) 5: تنظیم در حالت Simple PLC program 6: تنظیم در حالت Multi-step speed 7: تنظیم از طریق کنترل PID 8: کنترل از طریق پورت RS485 (مودباس) |
| P00.07 | تعیین مبنای کنترل فرکانس B |

سیمبندی مدار کنترل
شکل 2. نحوه سیمبندی مدار کنترل اینورتر سری GD10
راهنمای ترمینالها
میزان تحملپذیری اضافهبار
| اضافه بار | مدت زمان |
| 150 درصد جریان نامی | 1 دقیقه |
| 180 درصد جریان نامی | 10 ثانیه |
| 200 درصد جریان نامی | 1 ثانیه |
پارامترهای مهم و کاربردی
| پارامتر | نام | جزئیات |
| P00.01 | نحوه فرمان راهاندازی |
این پارامتر نحوه اجرای دستوراتی نظیر راهاندازی، توقف و جهت چرخش را به صورت زیر مشخص میکند. 0: کنترل از طریق صفحه کلید 1: کنترل از طریق ترمینالهای خارجی 2: کنترل از طریق پورت RS485 (مودباس) |
| P00.06 | تعیین مبنای کنترل فرکانس A | 0: تنظیم از طریق صفحه کلید
1: تنظیم از طریق ورودی آنالوگ 1 یا AI1 (از طریق پتاسیومتر) 2: تنظیم از طریق ورودی آنالوگ 2 یا AI2 6: تنظیم در حالتMulti-step speed 7: تنظیم از طریق کنترل PID 8: کنترل از طریق پورت RS485 (مودباس) |
| P00.07 | تعیین مبنای کنترل فرکانس B |

سیمبندی مدار کنترل

شکل 3. نحوه سیمبندی مدار کنترل اینورتر سری GD200
راهنمای ترمینالها
میزان تحملپذیری اضافهبار
| نوع | اضافه بار | مدت زمان |
|
G |
150 درصد جریان نامی | 1 دقیقه |
| 180 درصد جریان نامی | 10 ثانیه | |
| 200 درصد جریان نامی | 1 ثانیه | |
| P | 120 درصد جریان نامی | 60 ثانیه |
پارامترهای مهم و کاربردی
| پارامتر | نام | جزئیات |
| P00.01 | نحوه فرمان راهاندازی | این پارامتر نحوه اجرای دستوراتی نظیر راهاندازی، توقف و جهت چرخش را به صورت زیر مشخص میکند.
0: کنترل از طریق صفحه کلید 1: کنترل از طریق ترمینالهای خارجی 2: کنترل از طریق پورت RS485 (مودباس) |
| P00.06 | تعیین مبنای کنترل فرکانس A | 0: تنظیم از طریق صفحه کلید
1: تنظیم از طریق ورودی آنالوگ 1 یا AI1 2: تنظیم از طریق ورودی آنالوگ 2 یا AI2 3: تنظیم از طریق ورودی آنالوگ 3 یا AI3 4: تنظیم از طریق ترمینال پالس سرعت بالا (ترمینال HDI) 5: تنظیم در حالت Simple PLC program 6: تنظیم در حالتMulti-step speed 7: تنظیم از طریق کنترل PID 8: کنترل از طریق پورت RS485 (مودباس) |
| P00.07 | تعیین مبنای کنترل فرکانس B |

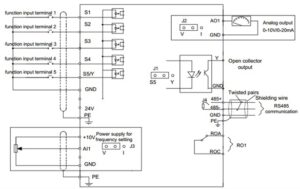
سیمبندی مدار کنترل

شکل 4. نحوه سیمبندی مدار کنترل اینورتر سری CHE100
راهنمای ترمینالها
میزان تحملپذیری اضافهبار
| اضافه بار | مدت زمان |
| 150 درصد جریان نامی | 1 دقیقه |
| 180 درصد جریان نامی | 10 ثانیه |
پارامترهای مهم و کاربردی
| پارامتر | نام | جزئیات |
| P0.01 | نحوه فرمان راهاندازی | این پارامتر نحوه اجرای دستوراتی نظیر راهاندازی، توقف و جهت چرخش را به صورت زیر مشخص میکند.
0: کنترل از طریق صفحه کلید 1: کنترل از طریق ترمینالهای خارجی 2: کنترل از طریق پورت RS485 (مودباس) |
| P0.03 | تعیین مبنای کنترل فرکانس A | 0: تنظیم از طریق صفحه کلید
1: تنظیم از طریق ورودی آنالوگ 1 یا AI1 2: تنظیم از طریق ورودی آنالوگ 2 یا AI2 3: تنظیم از طریق AI1+AI2 4: تنظیم در حالتMulti-step speed 5: تنظیم از طریق کنترل PID 6: کنترل از طریق پورت RS485 (مودباس) |

سیمبندی مدار کنترل
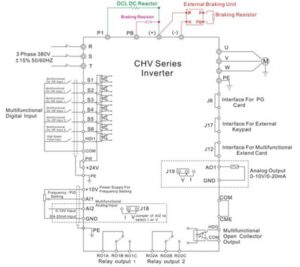
شکل 5. نحوه سیمبندی مدار کنترل اینورتر سری CHV100
راهنمای ترمینالها
میزان تحملپذیری اضافهبار
| اضافه بار | مدت زمان |
| 150 درصد جریان نامی | 1 دقیقه |
| 180 درصد جریان نامی | 10 ثانیه |
پارامترهای مهم و کاربردی
| پارامتر | نام | جزئیات |
| P0.01 | نحوه فرمان راهاندازی | این پارامتر نحوه اجرای دستوراتی نظیر راهاندازی، توقف و جهت چرخش را به صورت زیر مشخص میکند.
0: کنترل از طریق صفحه کلید 1: کنترل از طریق ترمینالهای خارجی 2: کنترل از طریق پورت RS485 (مودباس) |
| P0.03 | تعیین مبنای کنترل فرکانس A |
0: تنظیم از طریق صفحه کلید 1: تنظیم از طریق ورودی آنالوگ 1 یا AI1 2: تنظیم از طریق ورودی آنالوگ 3 یا AI3 3: تنظیم از طریق ترمینال پالس سرعت بالا (ترمینال HDI1) 4: تنظیم در حالت Simple PLC program 5: تنظیم در حالتMulti-step speed 6: تنظیم از طریق کنترل PID 7: کنترل از طریق پورت RS485 (مودباس) |
سیمبندی مدار کنترل
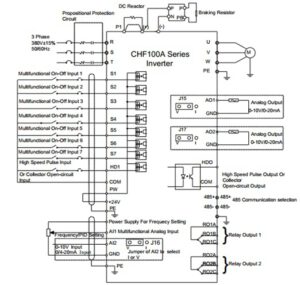
شکل 6. نحوه سیمبندی مدار کنترل اینورتر سری CHF100
راهنمای ترمینالها
میزان تحملپذیری اضافهبار
| اضافه بار | مدت زمان |
| 150 درصد جریان نامی | 1 دقیقه |
| 180 درصد جریان نامی | 10 ثانیه |
پارامترهای مهم و کاربردی
| پارامتر | نام | جزئیات |
| P0.01 | نحوه فرمان راهاندازی |
این پارامتر نحوه اجرای دستوراتی نظیر راهاندازی، توقف و جهت چرخش را به صورت زیر مشخص میکند. 0: کنترل از طریق صفحه کلید 1: کنترل از طریق ترمینالهای خارجی 2: کنترل از طریق پورت RS485 (مودباس) |
| P0.07 | تعیین مبنای کنترل فرکانس A | 0: تنظیم از طریق صفحه کلید
1: تنظیم از طریق ورودی آنالوگ 1 یا AI1 2: تنظیم از طریق ورودی آنالوگ 2 یا AI2 3: تنظیم از طریق ترمینال پالس سرعت بالا (ترمینال HDI) 4: تنظیم در حالت Simple PLC program 5: تنظیم در حالتMulti-stage speed 6: تنظیم از طریق کنترل PID 7: تنظیم از طریق پورت RS485 (مودباس) |
| P0.08 | تعیین مبنای کنترل فرکانس B | 0: تنظیم از طریق ورودی آنالوگ 1 یا AI1
1: تنظیم از طریق ورودی آنالوگ 2 یا AI2 2: تنظیم از طریق ترمینال پالس سرعت بالا (ترمینال HDI) |
سروو موتورها عموما قابلیت پشتیبانی از 3 مد کنترلی، کنترل موقعیت Position Control ، کنترل سرعت Speed Control و کنترل گشتاور Torque Control را دارند.برخی
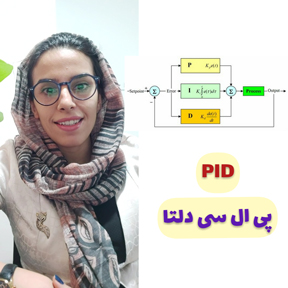
کنترلکننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) را محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل
سلام، وقت بخیر
چطور میتونم کمکتون کنم؟
