آموزشی
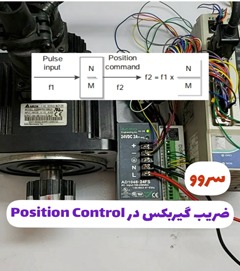
تنظیم ضریب گیربکس سروو موتور در مد Position Control
سروو موتورها عموما قابلیت پشتیبانی از 3 مد کنترلی، کنترل موقعیت Position Control ، کنترل سرعت Speed Control و کنترل گشتاور Torque Control را دارند.برخی

سروو موتورها عموما قابلیت پشتیبانی از 3 مد کنترلی، کنترل موقعیت Position Control ، کنترل سرعت Speed Control و کنترل گشتاور Torque Control را دارند.برخی
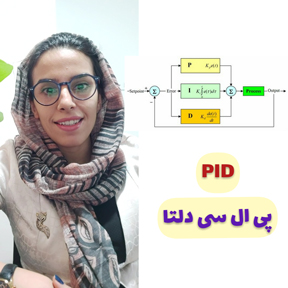
کنترلکننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) را محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل
سلام، وقت بخیر
چطور میتونم کمکتون کنم؟
