آموزشی
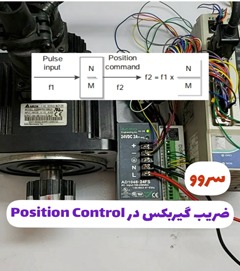
تنظیم ضریب گیربکس سروو موتور در مد Position Control
سروو موتورها عموما قابلیت پشتیبانی از 3 مد کنترلی، کنترل موقعیت Position Control ، کنترل سرعت Speed Control و کنترل گشتاور Torque Control را دارند.برخی
سروو موتورها یکی از تجهیزات صنعتی با راندمان بسیار عالی میباشند که اخیرا در صنعت ایران بسیار مورد توجه قرار گرفته اند. ما در این مقاله درباره اینکه سروو موتور چیست و چگونه عمل میکند بحث خواهیم کرد. همچنین ساختمان داخلی آنرا با ارائه اشکال مختلف بررسی میکنیم.
سروو موتور چیست؟
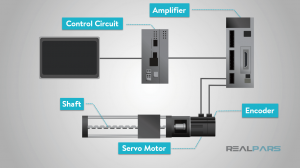
سروو موتورها بخشی از یک سیستم حلقه بسته هستند که از چندین بخش شامل مدار کنترل، سروو موتور، پتانسیومتر، شفت، تقویتکننده و یک انکودر تشکیل شدهاند.
سروو موتور یک دستگاه الکتریکی است که بخشهایی از یک ماشین را با راندمان قابل قبول و دقت زیادی میچرخاند. ویژگی خاص این موتور این است که شفت خروجی آن میتواند مطابق با یک زاویه، موقعیت و سرعت خاص حرکت کند. این ویژگی برای این موتورها منحصر به فرد است و در یک موتور معمولی یافت نمیشود.
در سروو موتورها از یک موتور معمولی استفاده میشود. همچنین، در این تجهیز، یک سنسور برای دریافت بازخورد موقعیت به کار گرفته میشود. کنترلر مهمترین بخش موتور سروو است که برای این تجهیز طراحی و استفاده میشود.
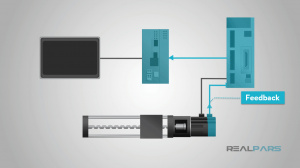
سروو موتور از یک مکانیزم حلقه بسته بهره میگیرد که در آن از فیدبک موقعیت به منظور کنترل سرعت خطی یا چرخشی و موقعیت استفاده میکند.
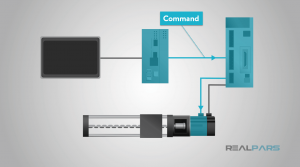
این موتورها با یک سیگنال الکتریکی آنالوگ یا دیجیتال کنترل میشوند. این سیگنال مقدار حرکتی که نشاندهنده موقعیت نهایی و مطلوب شفت است را تعیین میکند.
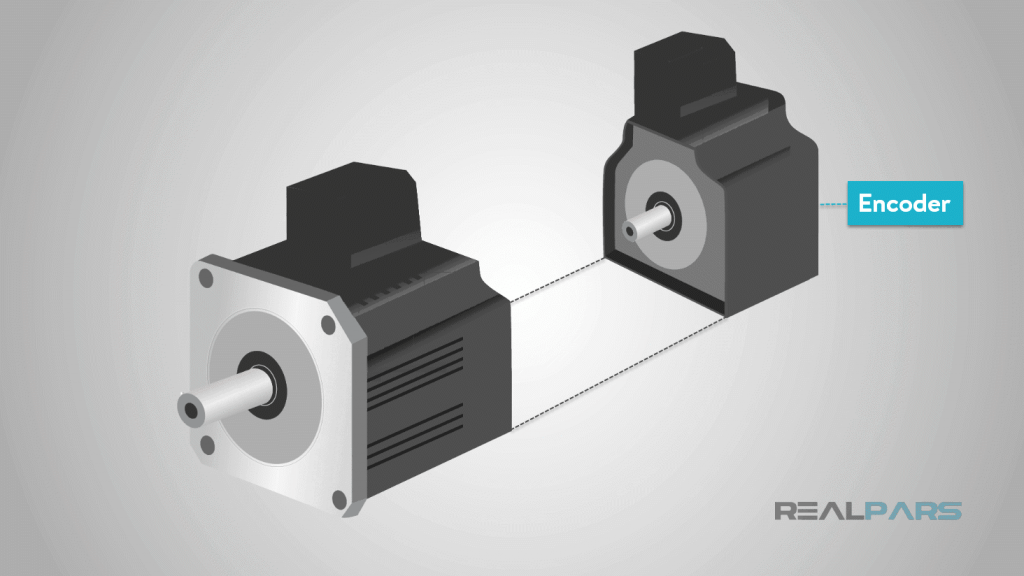
انکودر به عنوان یک سنسور عمل میکند که وظیفه آن فراهم کردن بازخورد یا فیدبک سرعت و موقعیت میباشد. انکودر در داخل محفظه موتور نصب میشود.

انواع موتورهای سروو
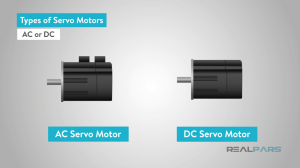
سروموتورها را میتوان براساس کاربرد آنها به گروههای مختلفی طبقهبندی کرد. بر اساس یکی از دسته بندیها، سرووها به دو دسته AC و DC تقسیم میشوند.
سه مورد اصلی در زمان ارزیابی این موتورها مورد توجه قرار دارند. مورد اول براساس AC یا DC بودن آنها، دوم براساس نوع کموتاسیون میباشد. به این صورت که آیا موتور دارای جاروبک است یا خیر. سوم هم در نظر گرفتن میدانهای گردان موتور میباشد. اینکه این چرخش به صورت سنکرون یا آسنکرون است برای این موتورها دارای اهمیت میباشد. تفاوت اصلی بین موتورهای AC و DC در توانایی کنترل سرعت است.
موتوهای AC و DC
در موتور DC، سرعت مستقیما متناسب با ولتاژ تغذیه با یک بار ثابت است. و در یک موتور AC، سرعت با فرکانس ولتاژ اعمالی و تعداد قطبهای مغناطیسی تعیین میشود. در حالی که هر دو موتور AC و DC در سیستمهای سروو مورد استفاده قرار میگیرند، موتورهای AC به دلیل اینکه مقاومت بیشتری در برابر جریانهای بالا دارند از محبوبیت و عملکرد بهتری برخوردار هستند. عمده کاربرد آنها در رباتیک و صنعت، جایی که دقت بسیار بالا لازم و ضروری است، میباشد.
در گام بعدی، موتورهای با یا بدون جاروبک را بررسی میکنیم. کموتاسیون در موتورهای DC به صورت مکانیکی با جاروبکها و توسط کموتاتور انجام میشود. موتورهای دارای جاروبک معمولا ارزان تر از موتورهای بدون جاروبک میباشند و همچنین کار کردن با آنها آسان تر میباشد. این درحالی میباشد که موتورهای بدون جاروبک دارای قابلیت اطمینان بالاتر و راندمان بهتری میباشند.
کموتاتور چیست؟
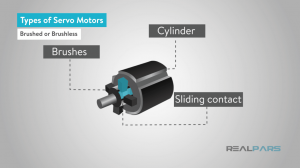
کموتاتور یک سوئیچ الکتریکی چرخان است که به صورت دورهای جهت جریان را بین روتور و مدار درایو جا به جا میکند. کموتاتور شامل یک استوانه است که از چند بخش کنتاکت فلزی روی روتور تشکیل شده است. دو یا چند کنتاکت الکتریکی که جاروبک نام دارند، از یک ماده هادی مانند کربن ساخته شده و در مقابل کموتاتور تعبیه میشوند. هنگام چرخش روتور، جاروبکها با بخشهای رسانای کموتاتور تماس لغزشی خواهند داشت.
در حالی که اکثر موتورهای مورد استفاده در سیستمهای سرو، موتورهای AC بدون جاروبک هستند، گاهی هم از موتورهای مغناطیس دائم دارای جاروبک به دلیل سادگی و هزینه پایین آنها در این سیستمها استفاده میشود. همچنین، متداول ترین نوع موتورهای DC دارای جاروبک که در کاربردهای سروو استفاده می شود، موتورهای DC از نوع مغناطیس دائم است.
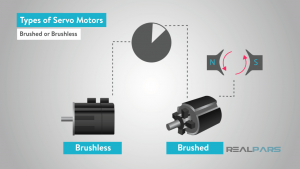
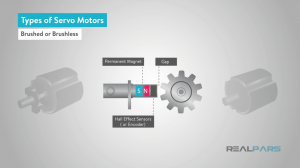
در موتورهای DC بدون جاروبک، جاروبکهای فیزیکی و کموتاتور با یک معادل الکترونیکی که معمولاً از سنسور اثر هال یا یک انکودر تشکیل شده است جایگزین میشوند.
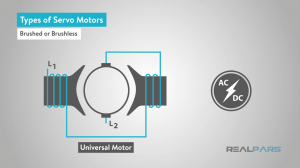
موتورهای AC عموماً بدون جاروبک هستند، اگرچه برخی از ماشینها مانند موتورهای یونیورسال وجود دارد، که هم با برق AC و هم با DC میتوانند کار کنند، دارای جاروبک بوده و کموتاسیون در آنها به صورت مکانیکی انجام میشود.
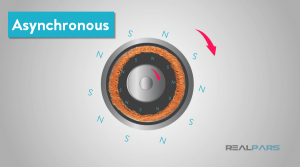
موتورهای سنکرون و آسنکرون
دسته بندی آخر که مورد بررسی قرار میگیرد در ارتباط با این نکته میباشد که میدان گردان سروو موتور سنکرون یا آسنکرون میباشد. در حالیکه موتورهای DC معمولا با توجه به اینکه دارای جاروبک میباشند یا خیر دسته بندی میشوند و مورد بررسی قرار میگیرند، موتورهای AC از لحاظ سرعت میدان سنکرون یا آسنکرون گردانشان مورد بحث قرار میگیرند. همانطور که قبلا ذکر شد، در یک موتور AC، سرعت توسط فرکانس ولتاژ تغذیه و تعداد قطبهای مغناطیسی تعیین میشود. از این سرعت به عنوان سرعت سنکرون یاد میشود.
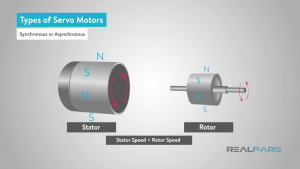
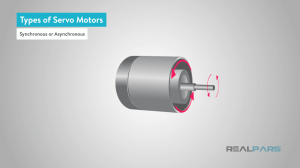
بنابراین، در یک موتور سنکرون، روتور با سرعت میدان مغناطیسی گردان استاتور میچرخد. در یک موتور آسنکرون که معمولاً از آن به عنوان موتور القایی نیز یاد میشود، روتور با سرعت کمتری از میدان مغناطیسی گردان استاتور میچرخد. با این حال، سرعت یک موتور آسنکرون با استفاده از چندین روش مانند تغییر تعداد قطبها و تغییر فرکانس، قابل کنترل میباشد.
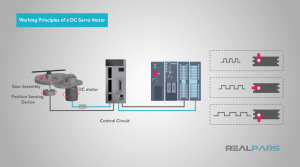
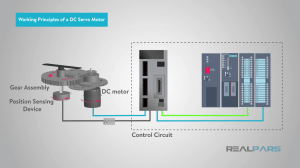
اصول کار یک سروو موتور DC بر پایه چهار جز اصلی شامل موتور DC، دستگاه سنجش موقعیت، مجموعه چرخدنده و مدار کنترل است. سرعت مطلوب موتور DC متناسب با ولتاژ اعمال شده به آن است. برای کنترل دور موتور، یک پتانسیومتر یک ولتاژ تولید میکند که به عنوان یکی از ورودیهای تقویت کننده خطا اعمال میشود.
در بعضی از مدارها، از پالس کنترل برای تولید ولتاژ مرجع DC متناسب با موقعیت یا سرعت دلخواه موتور استفاده میشود که به مبدل ولتاژ پهنای پالس اعمال میشود. در واقع، طول پالس، ولتاژ اعمال شده در تقویت کننده خطا را به عنوان ولتاژ دلخواه تعیین میکند تا سرعت یا موقعیت مورد نظر را تولید شود.
برای کنترل دیجیتال، از PLC یا کنترل کننده حرکت دیگری برای تولید پالس از نظر duty cycle استفاده میشود تا کنترل دقیق تری ایجاد شود.
سنسور سیگنال فیدبک یا بازخورد به طور معمول یک پتانسیومتر میباشد که یک ولتاژ متناسب با زاویه شفت موتور را از طریق مکانیزم چرخ دنده تولید میکند. سپس مقدار فیدبک ولتاز به ورودی تقویت کننده مقایسه گر خطا اعمال میشود. تقویت کننده، ولتاژی که از موقعیت فعلی موتور توسط فیدبک پتاسیومتر به دست میآید را با موقعیت مطلوب مقایسه میکند. از اختلاف این دو یک سیگنال خطا تولید میشود که یک ولتاژ منفی یا مثبت است.
این ولتاژ خطا به آرمیچر موتور اعمال میشود. با افزایش خطا، ولتاژ خروجی اعمال شده بر روی آرمیچر موتور نیز افزایش مییابد. تا زمانی که خطا وجود داشته باشد، تقویت کننده مقایسهگر، ولتاژ خطا را تقویت میکند و به همین ترتیب آرمیچر را تغذیه میکند. موتور نیز تا زمانی که خطا صفر شود می چرخد. اگر خطا منفی باشد، ولتاژ آرمیچر معکوس میشود و از این رو جهت چرخش آرمیچر عوض میشود.
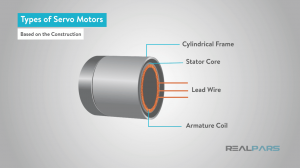
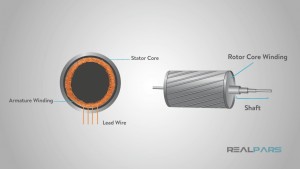
اصول کار سروو موتورهای AC بر اساس ساختار دو نوع سروو موتور آسنکرون و سنکرون میباشد. سروو موتور AC از استاتور و روتور تشکیل شده است. استاتور نیز از یک قاب استوانهای و هسته استاتور تشکیل شده است. سیم پیچ آرمیچر به دور هسته استاتور پیچیده شده است و این سیم پیچ به سیمی متصل میشود که از طریق آن جریان به موتور میرسد.
روتور از یک آهن ربا دائمی تشکیل شده است. این روتورها با روتور موتورهای القایی آسنکرون از این جهت تفاوت دارند که جریان در آنها توسط الکترومغناطیس القا میشود. بنابراین، این موتورها به عنوان سروو موتورهای بدون جاروبک نامیده میشوند. با به کارگیری روتور ساخته شده از آهنربای دائمی، نیازی به جریان روتور وجود ندارد. بنابراین وقتی میدان استاتور متوقف میشود، روتور نیز در نتیجهی آن متوقف میشود. این موتورها به دلیل عدم وجود جریان روتور بازده بالاتری دارند.
همچنین، زمانیکه موقعیت روتور نسبت به استاتور مورد نظر باشد، یک انکودر روی روتور قرار داده میشود که یک سیگنال فیدبک برای کنترلکننده سروو موتور مهیا میکند.
استاتور سروو موتور AC آسنکرون از هسته استاتور، سیم پیچ آرمیچر و سیم خروجی تشکیل شده و روتور از شفت و سیم پیچ هسته روتور تشکیل شده است. بیشتر موتورهای آسنکرون دارای یک عنصر چرخشی مانند روتور معمولی یا قفس سنجابی هستند.
نکتهای که حائز اهمیت میباشد این است که فقط سیم پیچ استاتور با منبع تغذیه AC تغذیه میشود.
میدان شار متناوب در اطراف سیم پیچ استاتور با منبع تغذیه AC تولید میشود. این میدان شار متناوب با سرعت سنکرون میچرخد. شار گردان را میدان مغناطیسی چرخان (RMF) مینامند. سرعت نسبی بین میدان مغناطیسی چرخنده استاتور و هادیهای روتور باعث میشود که یک نیروی الکترومغناطیسی القا شده در هادیهای روتور، طبق قانون القای الکترومغناطیسی فارادی پدید بیاید. در واقع همین پدیده در ترانسفورماتورها نیز اتفاق میافتد.
جریان القا شده در روتور نیز یک میدان متناوب در اطراف خود ایجاد میکند. سرعت چرخش روتور به میدان شار دوار استاتور وابسته است. همچنین، روتور در همان جهتی که شار استاتور درحال چرخش است، میچرخد. در این حالت، روتور به سرعت میدان گردان استاتور نمیرسد، از این رو، به این دسته از موتورها آسنکرون میگویند.
سروو موتورها عموما قابلیت پشتیبانی از 3 مد کنترلی، کنترل موقعیت Position Control ، کنترل سرعت Speed Control و کنترل گشتاور Torque Control را دارند.برخی
کنترلکننده PID مقدار «خطا» بین خروجی فرایند و مقدار ورودی مطلوب (setpoint) را محاسبه میکند. هدف کنترلکننده، به حداقل رساندن خطا با تنظیم ورودیهای کنترل
سلام، وقت بخیر
چطور میتونم کمکتون کنم؟
